Leetcode 33. Search in Rotated Sorted Array
In this blog post, we’ll explore how to solve the LeetCode problem of searching for a target value in a sorted array that has been rotated an unknown number of times. This is a fascinating challenge that combines the elegance of binary search with the twist of handling a rotated structure. Let’s dive into the problem.
Problem Statement
We are given an array nums that is sorted in ascending order and has been rotated between 1 and n times, where n is the length of the array. Our task is to find the index of a given integer target in nums. If the target exists, we return its index; otherwise, we return -1. The array contains no duplicates, which simplifies our logic, and we aim to solve this efficiently, ideally in O(log n) time.
Sample Input and Output
Example 1:
- Input:
nums = [4, 5, 6, 7, 0, 1, 2],target = 0 - Output:
4 - Explanation: The target
0is found at index4.
Example 2:
- Input:
nums = [4, 5, 6, 7, 0, 1, 2],target = 3 - Output:
-1 - Explanation: The target
3is not present in the array.
Thought Process Behind the Approach
What Does “Rotated Sorted” Mean?
- Original Array: A sorted array like
[0, 1, 2, 4, 5, 6, 7]. - After Rotation: Becomes
[4, 5, 6, 7, 0, 1, 2]after rotating at some point. - Key Property: The array is split into two parts around a “pivot” (the smallest element), and each part is sorted within itself.
Why Binary Search?
- Standard Binary Search: Works on fully sorted arrays by cutting the search space in half each step.
- Here: The array isn’t fully sorted, but at least one half (left or right of the middle) is always sorted.
- Goal: Use this sorted half to decide where to search next.
Step 3: Finding the Sorted Half
- How to Check:
- Pick the middle element (
mid). - Compare
nums[left](start) withnums[mid]:- If
nums[left] <= nums[mid], the left half (lefttomid) is sorted. - If not, the right half (
midtoright) is sorted.
- If
- Pick the middle element (
- Why This Works: In a rotated sorted array without duplicates, the sorted half is always uninterrupted.
Step 4: Where Is the Target?
- If Left Half is Sorted:
- Range is
nums[left]tonums[mid]. - Check: Is
nums[left] <= target <= nums[mid]?- Yes: Target is in the left half.
- No: Target must be in the right half.
- Range is
- If Right Half is Sorted:
- Range is
nums[mid]tonums[right]. - Check: Is
nums[mid] <= target <= nums[right]?- Yes: Target is in the right half.
- No: Target must be in the left half.
- Range is
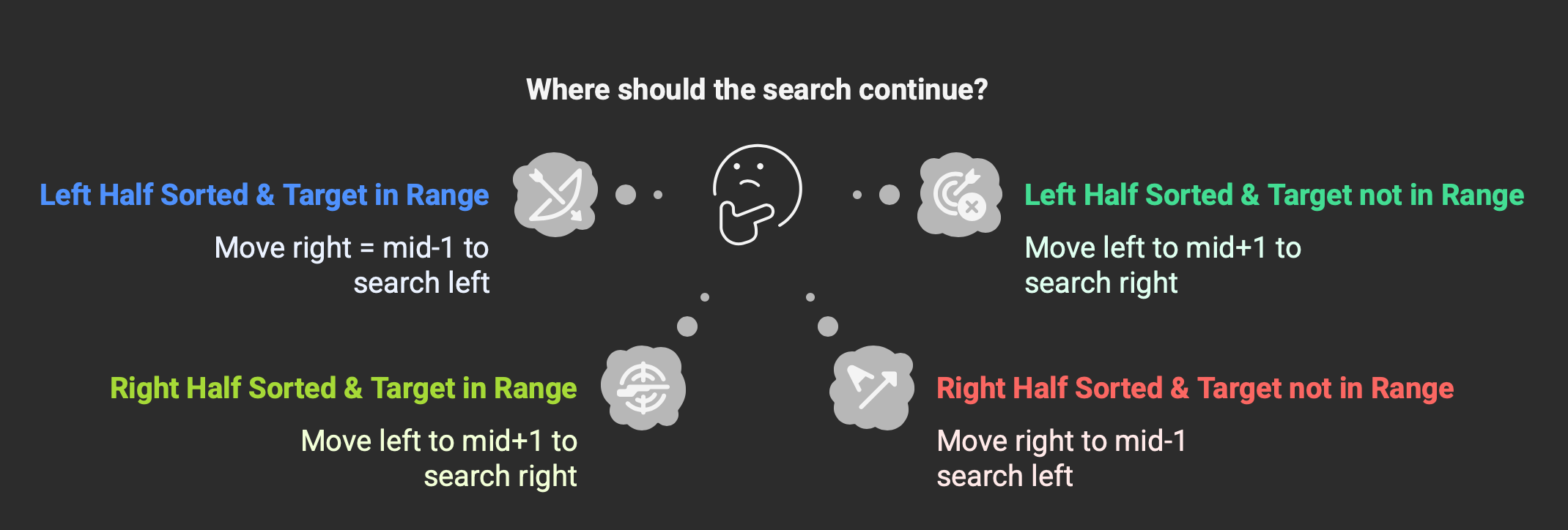
Step 5: Adjusting the Search
- Left Half Sorted and Target in Range:
- Move
right = mid - 1to search left.
- Move
- Left Half Sorted but Target Not in Range:
- Move
left = mid + 1to search right.
- Move
- Right Half Sorted and Target in Range:
- Move
left = mid + 1to search right.
- Move
- Right Half Sorted but Target Not in Range:
- Move
right = mid - 1to search left.
- Move
Walking Through Examples
Example 1: Target in Left Sorted Half
- Array:
[4, 5, 6, 7, 0, 1, 2], Target:6 - Initial State:
-
left = 0,right = 6,mid = 3-nums[left] = 4,nums[mid] = 7-4 <= 7, so left half[4, 5, 6, 7]is sorted. - Check Range:
-
4 <= 6 <= 7? Yes, search left:right = 2. - Next Step:
-
left = 0,right = 2,mid = 1-nums[mid] = 5 < 6, left half sorted,4 <= 6 <= 5? No,left = 2. - Final Step:
-
left = 2,right = 2,mid = 2-nums[mid] = 6, found at index2.
Example 2: Target in Right Sorted Half
- Array:
[6, 7, 0, 1, 2, 4, 5], Target:4 - Initial State:
-
left = 0,right = 6,mid = 3-nums[left] = 6,nums[mid] = 1-6 > 1, so right half[1, 2, 4, 5]is sorted. - Check Range:
-
1 <= 4 <= 5? Yes, search right:left = 4. - Next Step:
-
left = 4,right = 6,mid = 5-nums[mid] = 4, found at index5.
Example 3: Target at Pivot
- Array:
[3, 4, 5, 1, 2], Target:1 - Initial State:
-
left = 0,right = 4,mid = 2-nums[left] = 3,nums[mid] = 5-3 <= 5, left half[3, 4, 5]is sorted. - Check Range:
-
3 <= 1 <= 5? No, search right:left = 3. - Next Step:
-
left = 3,right = 4,mid = 3-nums[mid] = 1, found at index3.
Edge Cases
- One Element:
[1], target1→ Check and return0. - No Rotation:
[1, 2, 3, 4], target3→ Works as standard binary search. - Target at Ends:
[2, 1], target2or1→ Logic covers both.
Why It’s Efficient
- Always a Sorted Half: Guarantees we can decide where to search.
- Halving Each Step: Keeps time complexity at
O(log n).
Algorithm
Here’s the step-by-step algorithm:
- Base Case: If the array is
nullor empty, return-1. - Initialize Pointers: Set
left = 0andright = nums.length - 1. - Binary Search Loop: While
left <= right:- Compute
mid = left + (right - left) / 2(to avoid integer overflow). - If
nums[mid] == target, returnmid. - Check Left Half: If
nums[left] <= nums[mid], the left half is sorted.- If
nums[left] <= target < nums[mid], setright = mid - 1. - Else, set
left = mid + 1.
- If
- Check Right Half: Else, the right half is sorted.
- If
nums[mid] < target <= nums[right], setleft = mid + 1. - Else, set
right = mid - 1.
- If
- Compute
- Not Found: If the loop exits, return
-1.
This ensures we leverage the sorted portion at each step to make an informed decision.
Java Code
Here’s the implementation with detailed comments:
public class Solution {
public int search(int[] nums, int target) {
// Handle null or empty array
if (nums == null || nums.length == 0) {
return -1;
}
int left = 0;
int right = nums.length - 1;
while (left <= right) {
// Calculate middle index safely
int mid = left + (right - left) / 2;
// Target found
if (nums[mid] == target) {
return mid;
}
// Check if left half is sorted
if (nums[left] <= nums[mid]) {
// Check if target is in the left half's range
if (nums[left] <= target && target < nums[mid]) {
right = mid - 1; // Search left
} else {
left = mid + 1; // Search right
}
}
// Right half must be sorted
else {
// Check if target is in the right half's range
if (nums[mid] < target && target <= nums[right]) {
left = mid + 1; // Search right
} else {
right = mid - 1; // Search left
}
}
}
// Target not found
return -1;
}
}Key Points
- Efficiency: The algorithm runs in
O(log n)time, matching the performance of binary search, by halving the search space each iteration. - Space Complexity: Uses
O(1)extra space, relying only on a few variables.
Happy leetcoding!🚀